まずはご相談ください!
お問い合わせはコチラ
PRODUCTS
ワコー技研は、「1.モータ技術」「2.パワーエレクトロニクス技術」「3.制御技術」の3つのコアテクロノジーを元にした製品ラインナップをご用意。
「AGV(無人搬送車)関連製品」「汎用製品」のカタログ品のほか、カスタムメイド対応も可能。特殊用途向け専用機器開発にも多くの事例を持ちます。
モータ技術やパワーエレクトロニクス技術、制御技術に関するハードウェア、ソフトウェアの技術を有しており、様々な最先端分野でお客様の問題解決をはかり、「世の中にまだない」製品づくりをおこなっています。
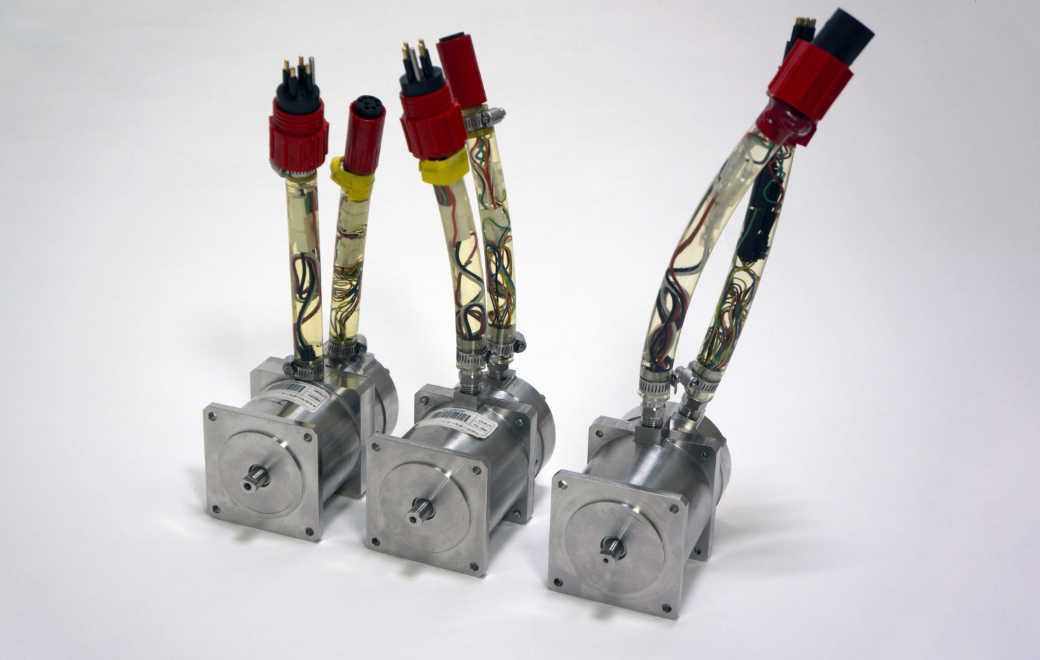
水深7000mを超える大深度で使用する海底設置型ビークルシステムの実現に向け、従来よりも小型で大深度に耐えうる水中サーボモータを国立研究開発法人 海洋研究開発機構と共同開発しています。
※国立研究開発法人 海洋研究開発機構はコチラ

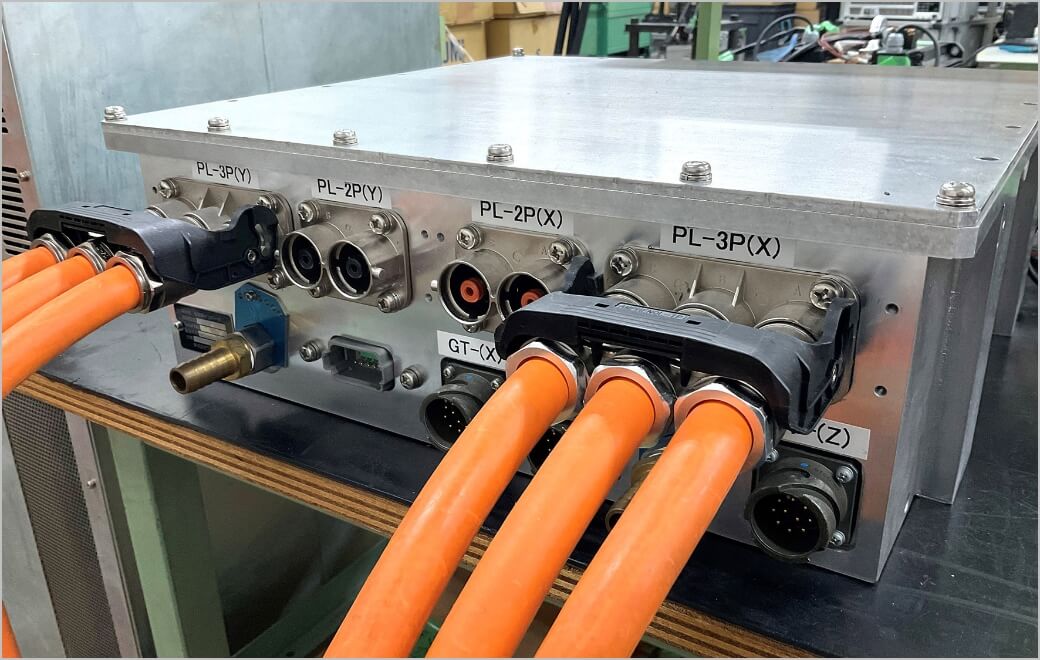
数百アンペアの大電流を必要とするサーボシステムでは、肥大化したモータ巻線や接続ケーブルの取り回し、コネクタやドライバ出力素子の部品選定など、設計の難所が多々あります。
その解決方法としてワコー技研では、モータ軸上の巻線をN個に分け、ドライバで別々に1/Nに分割された電流制御を行う方法を取り入れています。モータ巻線間の干渉や製造のバラつきによりソフトウェア制御は難しくなりますが、部品あたりの最大定格を下げることでハードウェア設計の幅を広げています。

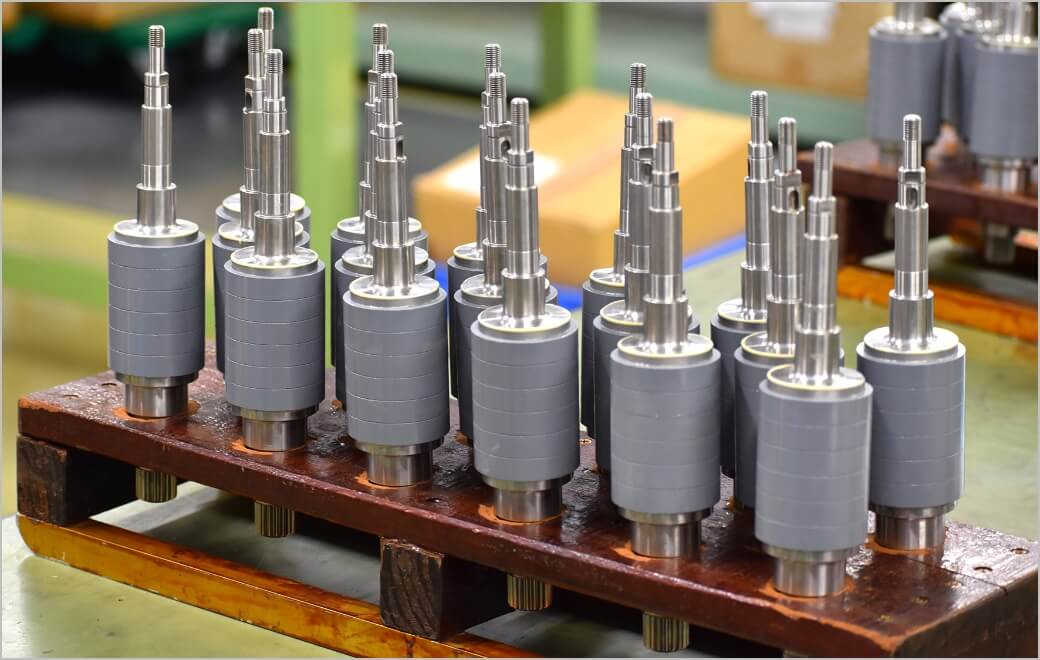
ネオジム磁石が開発されたことにより、モータの小型化が一気に進みました。ワコー技研も当然のことながら、このネオジム磁石を多く使用しております。ひとくちにネオジム磁石といっても色々な種類があり、モータの用途や温度環境により最適なものを選定しています。
ただネオジム磁石はレアアースを多く使った磁石で、高価かつ政治的な理由から供給が不安定になる事がしばしばあり、近年では脱レアアースの磁石も開発されてきました。ワコー技研では、有用な磁石が実用化されたら即製品に取り込めるよう、技術開発に取り組んでいます。


パワーコンディショナーには二つの役割があります。
一つは風力や太陽光などの自然エネルギーで発電された電力を効率よく取り出すこと、もう一つは取り出した電力を必要な電圧に変換することです。
環境の変化に追従した最大電力点での発電を維持するMPPT制御だけではなく、風車ではピッチ(羽の角度)や回転速度を制御することで、より高効率で発電することができます。ワコー技研では培ってきたモータ制御やパワー回路設計のノウハウを生かし、パワーコンディショナーの最適化に力を入れています。
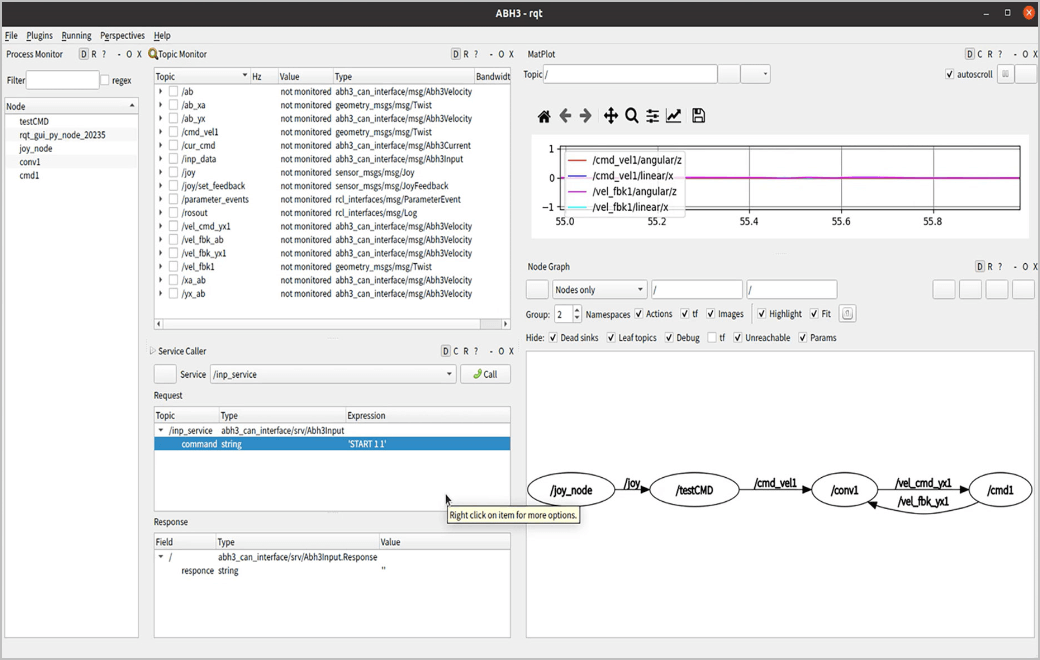
ロボットの開発では様々な制御プログラムを組合せて開発されますが、重複開発を避けるためにモジュール化が必要になります。しかし専用設計では再利用性が乏しく、コストの無駄が発生します。この問題を解決するための一つの方法としてROS(Robot Operating System)があります。2010年頃より米国コミュニティでROS1の開発が始まり、現在はROS1の問題点を補ったROS2へ移行しはじめています。
ワコー技研のABH3シリーズでは、ROS1(シリアル通信)とROS2(CAN/J1939通信)のサンプルモジュールを用意し、お客様のROSベース開発にお役立ていたします。

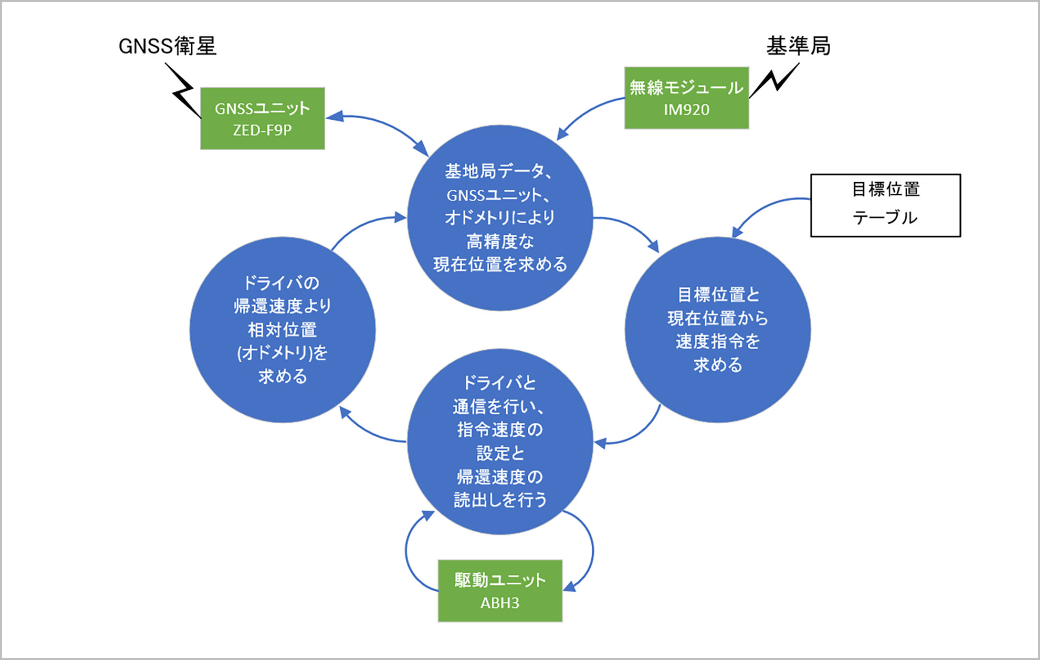
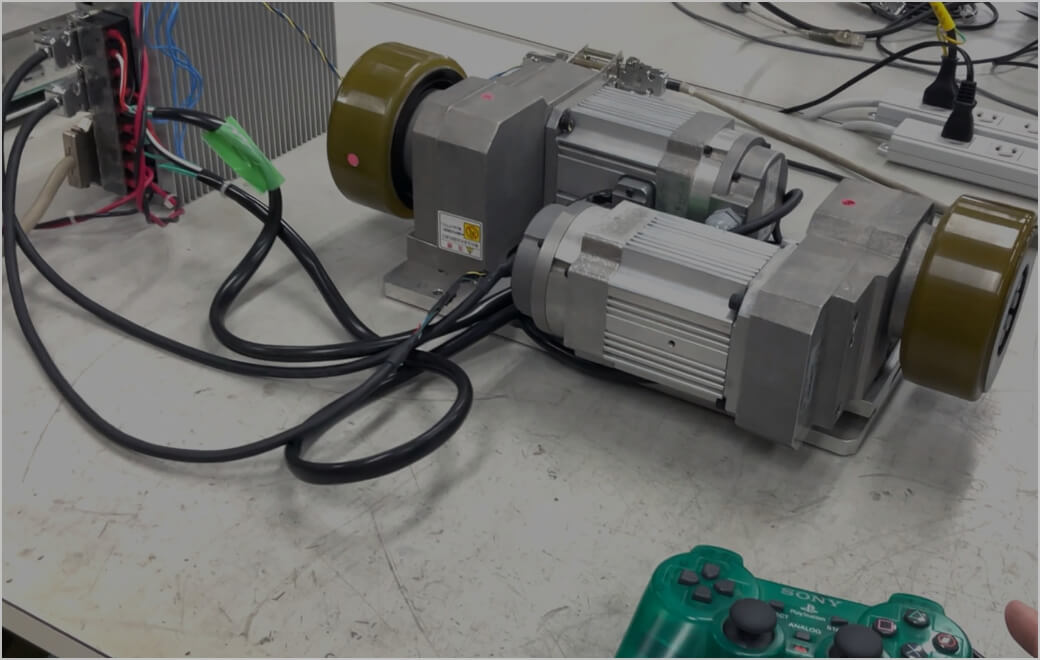
ワコー技研ではGNSS(Global Navigation Satellite System)を用いた無軌道AGVの研究開発をしています。社屋に専用のGNSS基準局を設置することで、2周波のRTK(Real Time Kinematic)による数cm精度の自己位置推定が可能となりました。
ただしAGVは移動体であり、絶えず測位衛星から品質が安定したGNSSデータを取得することはできません。実際にはサーボドライバ(ABH3)の走行速度、旋回速度から推定位置(オドメトリ位置)を計算し、GNSSデータと複合することで無軌道AGVを実現しています。
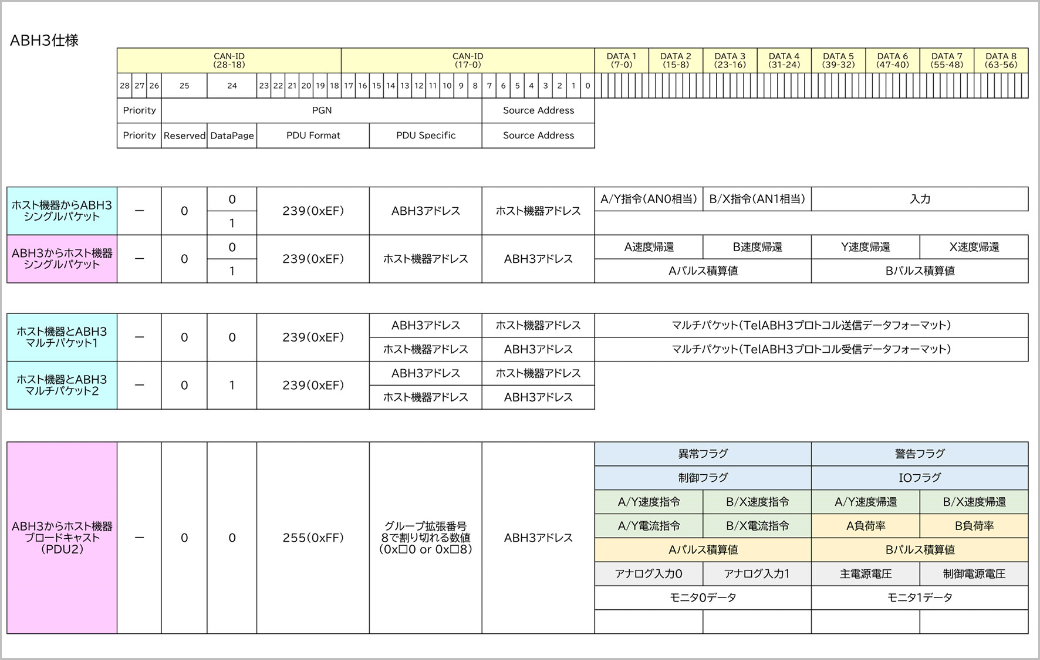
ワコー技研のABH3シリーズのCAN通信で使用するプロトコルはSAE(Society of Automotive Engineers)のJ1939準拠となっています。SAE-J1939の通信プロトコルは、トラック・バスや建機車両のエンジン制御などに用いられており、この通信プロトコルをサーボドライバに実装することで、コマンドラインによるAGV制御が可能となりました。
拡張フォーマット(29bitID)を送受信できるCANインターフェースであれば接続できます。
(各種サンプルを用意しておりますので、お問い合わせください)

サーボドライバはシステム(上位コントローラ)の指令をもとにモータを駆動します。その指令伝達の手段としてひと昔前はアナログ信号やI/Oが良く使われていましたが、高性能で小型のマイコンが低価格で買える世の中になり、近頃は通信で指令するシステムが多くなりました。ただ通信といってもEthernet、CAN、Modbus、お客様の独自プロトコルなど色々あり、またそれを実現するハードウェアとソフトウェアも千差万別です。
ワコー技研ではお客様の開発の手間を少しでも削減できるよう、希望する通信プロトコルを搭載したサーボドライバを開発しております。また既存のプロトコルに不足がある場合、オリジナルプロトコルの提案~開発~実装なども行っております。