まずはご相談ください!
お問い合わせはコチラ
FLOW
カンタン!わかりやすい!!
コレならできる自作AGV
STEP1
次の1~4の部品ユニットに、5の「車輪付きサーボモータ」と「サーボドライバ」を用意するだけで電動化できます。さらにサーボドライバにあたえる動きのきっかけを「スイッチやボリューム」からジョイスティックに変えれば、後退や旋回も自由自在です。
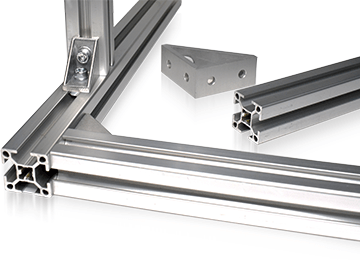
1. 筐体
アルミフレームや市販の台車

2. バッテリ
電源

3. キャスター
受動輪2軸

4. スイッチやボリューム
動きのきっかけ
![]()
ワコー技研
部品
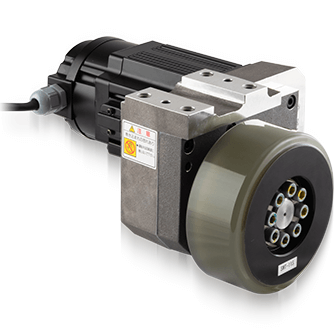
5-1. 車輪付きサーボモータ
駆動輪2軸
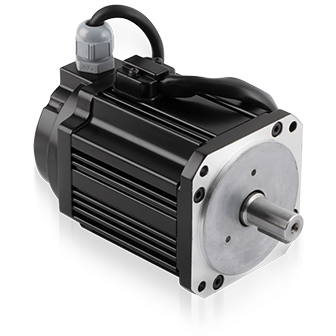
5-2. サーボドライバ
サーボモータ2軸を動かすドライバ
ワコー技研
オプション
STEP2
1~5の電動台車にガイドセンサを追加すると、AGVとしてのベースシステムができます。
多彩なワコー技研のコアパーツをご利用いただくことで、カンタンにAGVのコアユニット化できます。

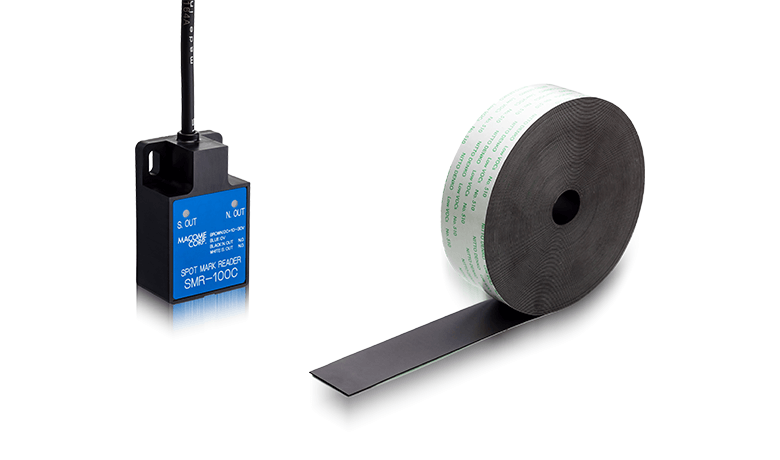
6-1. ガイドセンサ
6-2. 直線/曲線 磁気テープ
路面上
電動台車にガイドセンサを追加すると、ガイドテープをトレースし、自動運転が可能になる(AGV のベースシステム)
![]()
複雑に動かしたい
7-1. 番地センサ
7-2. 番地 磁気テープ
路面上
番地センサをサーボドライバに配線すれば、磁気テープをまたぐタイミングで、速度可変や経路の分岐など複雑な動きが実現できます
お客様対応
STEP3
外部ロジックやリレー信号の出力をサーボドライバに配線し、動きに取り込むことはできますが、ここまで完成すると欲が出てくるものです。
試作ではソフト的に変更可能な、シーケンサなど上位装置をご用意いただくと立上げをスムーズに行えます。
お客様の自信がついたら、ぜひステップアップをオススメします。
バンパースイッチ
近接、対人センサ
安全面の確保
パトランプ
メロディブザー
存在感のアピール

充電端子
充電器
バッテリ充電方法の検討

汎用性のある
上位機種
PLC、シーケンサ etc.
![]()
ワコー技研は、お客様が理想とされる
高性能AGVづくりを
全面サポートいたします!
FEATURES
専用ドライバによる
駆動輪の完全同期
2軸一体型のABH3シリーズには、進行軸/旋回軸の「AGV向けモデル制御」が搭載されています。
上位装置で2輪駆動の速度差を制御していただく必要はありません。
進行軸に指令速度、旋回軸にガイドセンサを接続するだけで磁気テープコースを簡単にトレースできます。

| 進行軸の速度指令のみ、旋回軸の速度指令=0 |
|---|
| 前進/後退 |
制御のしくみ
進行軸の速度指令は、左右の車輪速度の平均値として与えられます。
旋回軸の速度が“0”の時は、車輪速度差が“0”となって、進行軸の指令速度と左右車輪モータ速度が一致して直進します。

常に旋回中心は車輪の軸上にあり次のように移動し、進行指令との合算で動きます。
| 1 | 進行軸の速度指令>旋回軸の速度指令の時 |
|---|---|
| 左右の車輪は同一方向に駆動 |
| 2 | 進行軸の速度指令=旋回軸の速度指令の時 |
|---|---|
| 左車輪のみ駆動、右車輪(内側)は停止 |
| 3 | 進行軸の速度指令<旋回軸の速度指令の時 |
|---|---|
| 左右の車輪は反転方向に駆動 |
| 4 | 進行軸の速度指令=0、旋回軸の速度指令のみ |
|---|---|
| 左右の車輪は反転方向に駆動 (車輪間中央を旋回中心にその場で旋回) |
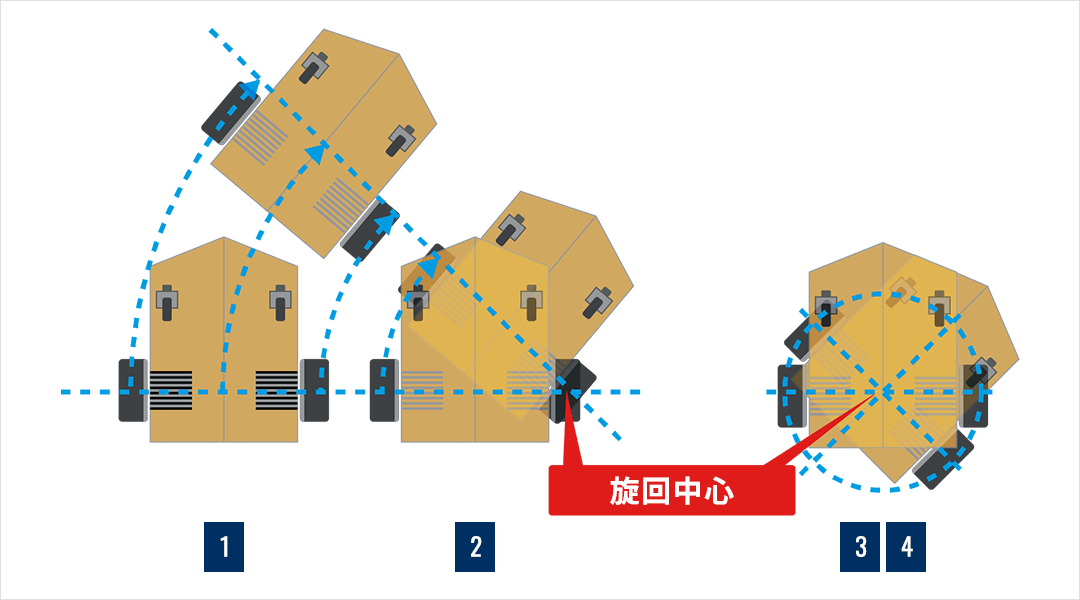
ABH3シリーズ搭載の「AGV向けモデル制御」の旋回においての動作原理
FEATURES
ココが違う!
ワコー技研のAGV
ユニット動作原理
1
車輪モータ部に半導体を非搭載
ワコー技研製のAGV用サーボモータは、レゾルバ方式の「モータセンサ」を採用。同方式は交流変圧器にも似た仕組みで、モータ内(角度検出)部は三つの巻き線だけで構成。
それにより、路面の振動を直接拾うAGVの車輪モータ部には、エンコーダ方式のような半導体部品を一切搭載せず、耐熱や耐振動、耐環境性に優れたタフ仕様となっています。
2
車輪モータ部に保持ブレーキを装備
AWRⅡとSWRシリーズには、「保持ブレーキ」を標準装備。モータ軸に直結したブレーキは出力トルク程度の保持力を持ち、停止中のワーク積み替えやバッテリ交換も安心して行えます。
また、組み合わせドライバのABH3シリーズは、サーボオンやアラームに連動してブレーキ電圧(DC24V)を制御する出力端子を用意。これを併用することで、異常時などのブレーキかけ忘れによる坂道での走り出しを防げます。
3
回生エネルギーでバッテリを充電
下り坂や急停止など進行と逆方向の力がモータに働くと、「回生エネルギー」が発生します。ABH3シリーズは、この回生エネルギーを主電源バッテリに戻す(充電)ことで、バッテリロスを軽減しています。
※ドライバは意図的に回生エネルギー吸収回路を実装していません。バッテリ以外の電源を使用する際はご相談ください
ADVICE
4輪台車[駆動輪2輪、受動輪(キャスターなど)2輪]で構成されたAGV車両についての車体・台車を含めた総質量の目安は、表のとおりです。なお、走行・旋回速度や登坂の有無、走行路面状況でも積載量は変わってきます。
詳しくは、当社までお問い合わせください。

| AWRⅡ010B | AWRⅡ030B-P AWRⅡ040B-P |
AWRⅡ075B-P AWRⅡ100B-P |
AWRⅡ220B | SWR010B-T11 | SWR020B-T15 | SWR040B-T23 | |
|---|---|---|---|---|---|---|---|
| 4輪台車時 総質量[Kg] |
500 | 1600 | 3200 | 4400 | 500 | 1000 | 2400 |
Excelによる「車輪付きモータ容量選定」フォームを準備しております。
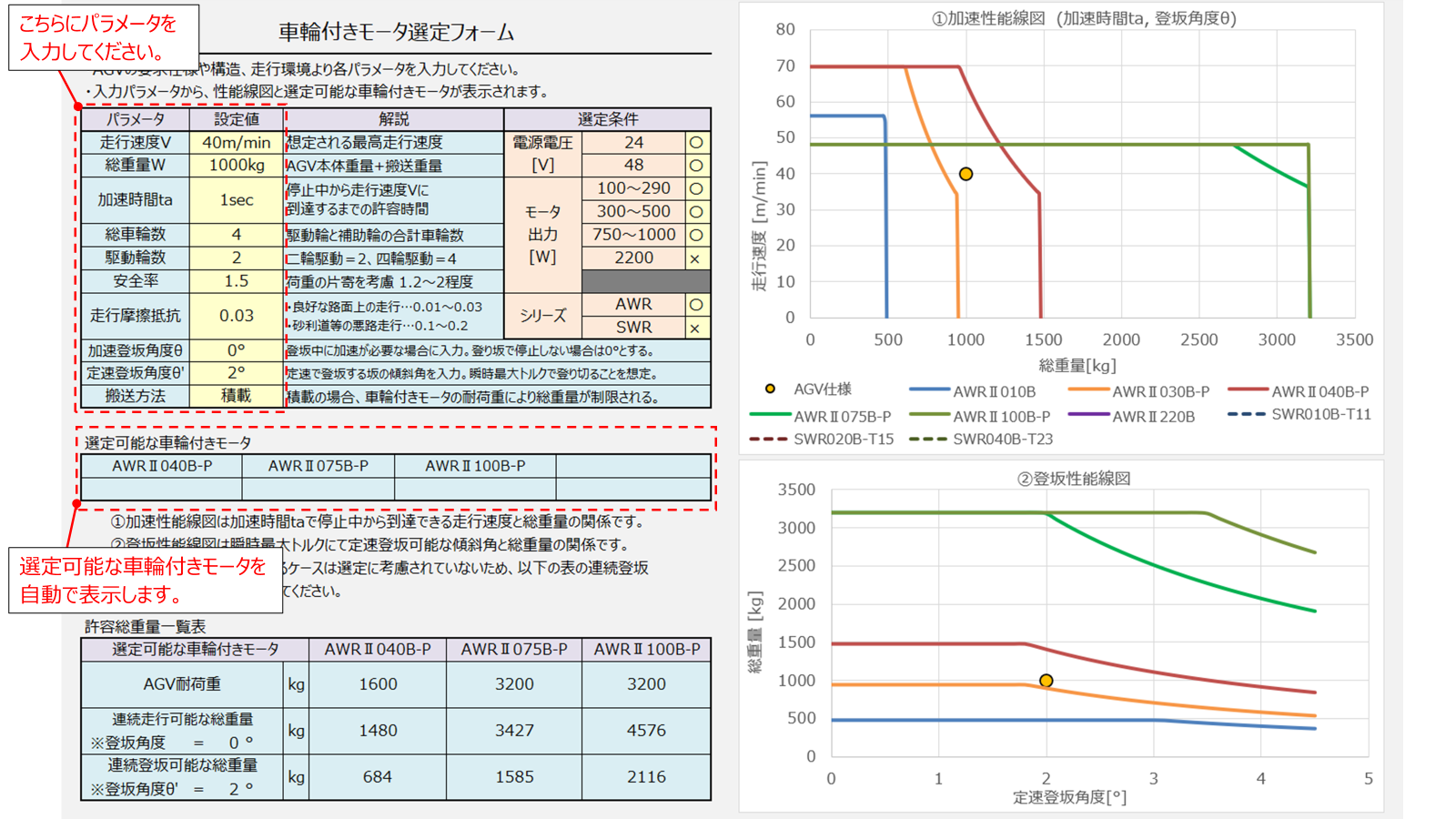
黄色枠のセルに、要求仕様数値、選択肢を選んで入力すると、グラフ画面に要求仕様が○点でプロットされます。
グラフで線引きされている部分が、車輪モータ型式ごとの限界値を示しています。
そのグラフを元に、選択可能なモータが一覧表に表示されます。
得られた情報を元に車輪モータ、ドライバを選びます。
バッテリを選定する際のサーボモータとドライバで必要とされる電力容量は、下記計算式を目安にご検討ください。
| M1 | 1軸目モータの仕事量[W] |
|---|---|
| M2 | 2軸目モータの仕事量[W] |
| Q | 総合効率(モータ効率、ドライバ効率0.6~0.7を目安とします。) |
| D | 駆動率(1回の駆動パターンで、モータが動作している割合) |
| T | 稼働時間[h] |
| BV | バッテリ電圧[V] |
| MA | 電源電流[A]=(M1+M2)÷Q÷BV |
| 必要容量 | 必要容量[Ah]=MA×(D×T) |
この必要容量をもとに、使用されるバッテリ種別、時間率や充電回数、同時に使用する他の制御機器を考慮のうえ選定してください。
ワコー技研AGVシリーズは、お客様ビジネスでの使用環境下において安定作動できるよう、設計アドバイスをさせていただいております。
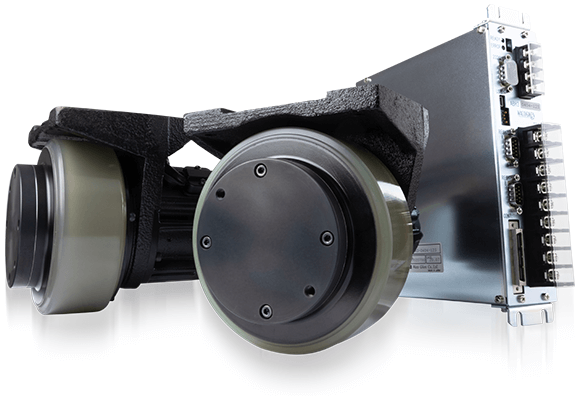
AGV最大積載量、移動/搬送速度、稼働時間の技術資料を掲載していますが、実機に触れながらお客様のお話を伺えるよう「AGVデモルーム」を開設しています。
製品導入のご相談やチューニングについても説明させていただきます。当社、営業部までお気軽にお問い合わせください。

「AGVデモルーム」の様子。実機を見ながら「バッテリ対応サーボシステム」についてご説明いたします。
LINE UP
AGV業界の第一線に
立ち続けて30年
より使いやすく、より高性能へ
既製AGVと異なり、「車輪付きサーボモータ」と「サーボドライバ」のキーパーツのみご提供することで自社に最適なAGVを自作できます。これにより大幅なローコスト化を実現し、AGV自作メリットの恩恵を得られます。
製品ラインナップは「車輪付き防塵防水モータ」や「軽車両向けサーボドライバ」など特殊用途にも展開中。モータ制御とパワーエレクトロニクスのプロとして、お客様を全力でバックアップします。